Wenn Roboter die Arbeit übernehmen: vom Transportieren bis zum Kicken
Adlershofer Forscher und Unternehmer sind an der Entwicklung hautnah dran
Es herrscht gespannte Ruhe, wenn das Team von Berlin United sich vor dem gegnerischen Tor tummelt. Wird es dem Spieler gelingen, den Ball so zu treffen, dass er zum Unentschieden aus gleichen kann? Dann brandet Jubel auf: 1 zu 1!
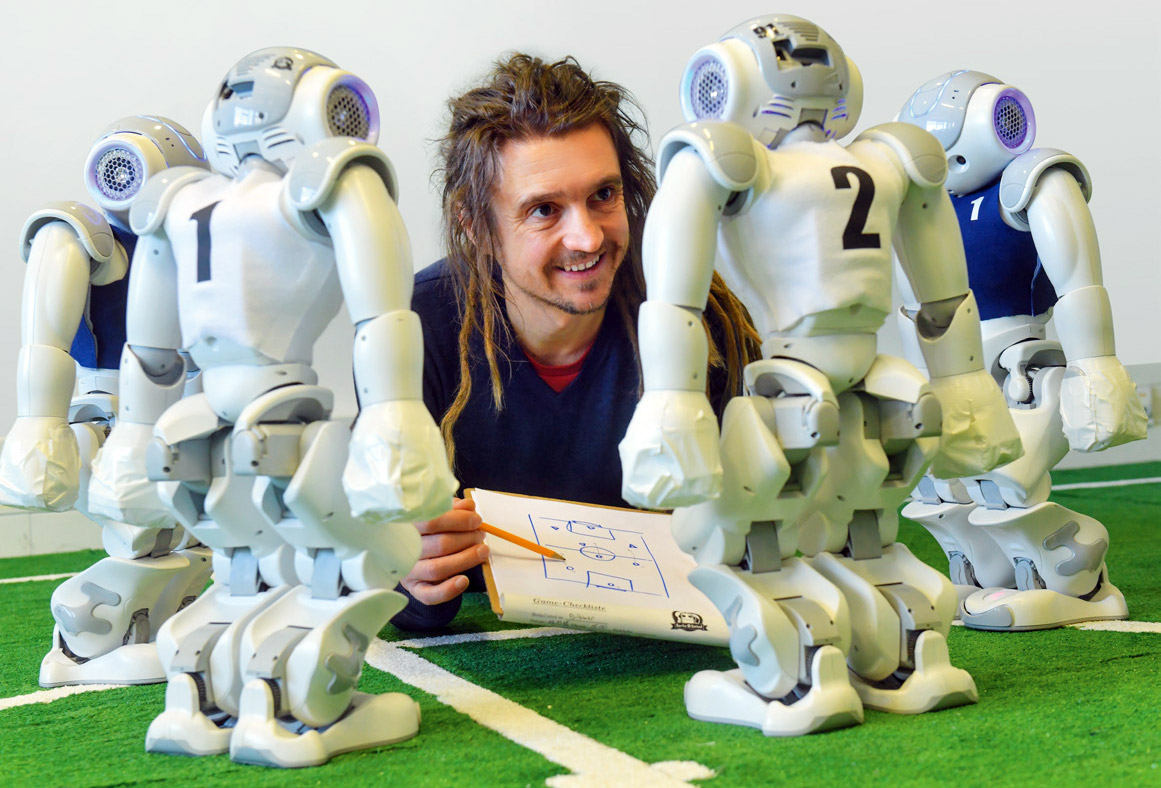
Am Passspiel könnte man noch feilen, würden nach dem Abpfiff vermutlich die Fußballtrainer Pál Dárdai oder Urs Fischer konstatieren. Auch Heinrich Mellmann, der „Coach“ von Team United, weiß, dass das Zusammenspiel seiner Mannschaft noch einer der großen Knackpunkte ist. Sein Team spielt allerdings in einer anderen Liga als Hertha BSC oder der 1. FC Union Berlin: Die fünf halbmeter großen humanoiden Roboter der Humboldt-Universität zu Berlin (HU) treten beim RoboCup an. Hier messen sich inter nationale Forscherteams mit verschiedenen Klassen von Robotern im Fußball.
„Mit dem RoboCup wollen wir die Entwicklung von intelligenten Robotern fördern“, erläutert der Informatiker und Mathematiker Mellmann, der in der Gruppe „Adaptive Systeme“ von Professorin Verena Hafner promoviert hat. „Dabei ist Fußball ein Modell problem, an dem neue Methoden entwickelt werden, mit denen sich Roboter selbstständig in einer realen Umgebung zurecht finden können.“
Im Laufe der Jahre haben die Forscher die Komplexität der Umgebung immer weiter gesteigert. Der Ball ist mittlerweile schwarz-weiß statt rot, die Tore weiß statt bunt, es wird auf Kunstrasen statt auf Teppich gespielt. Das Spiel findet unter natürlichen Lichtverhältnissen statt. Das ist für die eingeschränkte Sensorik – die Roboter vom Typ NAO sind für die räumliche Orientierung nur mit einer Kamera ausgestattet – eine echte Herausforderung, die es durch ausgeklügeltes Programmieren zu meistern gilt.
In kleinen Trippelschritten bewegen sich die Roboter über den Platz. Der Computer, der sie steuert, sitzt im Kopf. Wenn der Spieler fällt, steht er mit geschickten Bewegungen wieder auf. Wo ist der Ball? Wo das Tor? Wo stehen die Mitspieler? Wie muss ich den Ball treffen, um ihn zum gewünschten Ziel zu kicken?
Was beim Menschen nahezu intuitiv abläuft, soll künftig auch bei Robotern „ohne Trennung von Körper und Geist“ funktionieren, wie es Mellmann ausdrückt. Hierfür kommen Methoden der künstlichen Intelligenz (KI) ins Spiel, und das bedeutet in erster Linie: maschinelles Lernen. Ähnlich wie Profifußballer Spielabläufe, Passen, Torschüsse trainieren, sammeln auch die NAOs ihre Erfahrungen, um sich zu verbessern.
„Hinter KI steckt eine vollkommen andere Art zu programmieren, die wir zurzeit entwickeln und erforschen“, sagt Professor Holger Schlingloff von der HU und Chief Scientist des System Quality Center am Fraunhofer FOKUS. Dabei kommt etwa die Methode des sogenannten Deep Learning zum Einsatz. Sie ist dadurch charakterisiert, dass sie nicht alle möglichen Optionen analysiert, sondern anhand sehr vieler Beispiele lernt. Dabei hat kein Programmierer je festgelegt, in welchem Fall welche Aktion ausgeführt werden soll.
Um hier dennoch eine gewisse Kontrolle auch über die Qualität der Computerentscheidungen zu haben, beschäftigen sich die Forscher z. B. mit folgenden Fragen: Wie funktioniert Lernen überhaupt? Wie lässt sich ein sinnvolles Feedback an das lernende System gestalten? Wie verhindert man, dass etwas Falsches gelernt wird?
Der Aspekt der Sicherheit gehört zu den Spezialgebieten von Schlingloff. Sein Wissen bringt er auch in ein gemeinsames Forschungsprojekt mit der Firma InSystems Automation ein. Die Frage nach der Qualität von Software treibt auch Jan Stefan Zernickel um. Der Informatiker bei InSystems entwickelt Transportroboter. Sie sausen durch industrielle Produktionshallen, transportieren Kisten und bringen halbfertige Produkte von einer Ferti gungsstation zur nächsten. Nicht umsonst heißen sie „proANT“ (automatisch navigierende Transportroboter, vom englischen Wort „ant“ – Ameise – abgeleitet). Sie sollen in einer Fabrik einmal die klassische Fördertechnik ersetzen.
„Dieses System einzelner Roboter ist in vielerlei Hinsicht effizient: Sie sparen Platz, was zunehmend auch für Fabriken ein teures Gut ist. Sie können skalierbar und flexibel eingesetzt werden, denn die Produktion wird zunehmend individueller – mit weniger großen Stückzahlen und häufigeren Neukonfigurationen von Anlagen“, erläutert Zernickel. Auch gegenüber spurgeführten oder zentral gesteuerten Robotern seien sie flexibler und robuster.
Künftig sollen sich die Roboterkolonnen selbst organisieren. Das heißt, sie sollen selbst entscheiden, wer von ihnen wann welche Aufgabe übernimmt. „Kooperativ“ und „kollaborativ“ nennt Zernickel das.
Gespickt mit allerlei Sensoren, die Auskunft geben über den Betriebszustand, die Orientierung im Raum verschaffen und Zusammenstöße mit Menschen und Maschinen verhindern, können die Roboter ihre Daten in einem eigenen Bordcomputer verarbeiten und über WLAN miteinander kommunizieren. Ihnen werden nur noch globale Ziele vorgegeben, etwa: In zwanzig Minuten braucht die Maschine soundso viele Schrauben. Dann muss ausgetüftelt werden: Wer ist am dichtesten dran? Wer hat wann schon andere Aufgaben? Reicht der Batteriefüllstand?
„Mithilfe von KI wollen wir Muster im Betrieb erkennen – sowohl beim kollektiven Verhalten als auch bei der Selbstoptimierung jeder einzelnen Maschine“, sagt Zernickel. Zum Beispiel, wenn es um die Feinpositionierung beim Aufgreifen einer Materialkiste geht. Dafür ist es wichtig, alle Sensordaten zu analysieren.
Trotz aller aktuellen Euphorie um KI und ihre Möglichkeiten – es gibt auch Risiken: Die Roboterforscher Mellmann und Zernickel betonen, dass sie in dieser Richtung erst ganz am Anfang stehen. „Man muss gut überlegen, wann man KI einsetzt. Besonders wichtig sind eine sehr große Menge an Trainingsdaten und ein gutes Feedback“, sagt auch Schlingloff. Dass sich die Technologie im Zeitalter der immer größeren verfügbaren Datenmengen noch einmal aufhalten lassen könne, glauben sie nicht. Umso wichtiger sei es, die Öffentlichkeit an den Entwicklungen teilhaben zu lassen, findet Mellmann.
Von Dr. Uta Deffke für Adlershof Journal